Thứ ba, 6/8/2019, 8:35 (GMT+7)
Mạng khu vực điều khiển (CAN) là một giao thức truyền thông nối tiếp được tiêu chuẩn hóa bởi ISO và được sử dụng để truyền các thông tin quan trọng. CAN được áp dụng trong một loạt các lĩnh vực như các thiết bị y tế đòi hỏi cao, máy móc công nghiệp, hệ thống tàu thuỷ, tàu ngầm, phương tiện đường sắt, thang máy...CAN cung cấp các tính năng như khả năng chống nhiễu cao, khả năng phát hiện lỗi và ngắt kết nối, tính toàn vẹn dữ liệu nhất quán và giám sát lẫn nhau với các thiết bị được kết nối. Trong ngành cửa tự động trên thế giới, công nghệ mạng này chỉ được áp dụng cho bộ điều khiển NET-DS của NABCO.
Phần 1: Quá trình phát triển và ứng dụng của CAN (Controller Area Network)
Nabco tự hào là đơn vị đầu tiên trên thế giới áp dụng công nghệ giao tiếp CAN (Controller Area Network). Và chính điều này đã góp phần làm nên sự khác biệt cũng như thành công của Nabco. Để biết rõ vì đâu mà Nabco lại tự hào như vậy ta tìm hiểu về giao tiếp CAN được sử dụng trong cửa tự động của Nabco có gì đặc biệt.
CAN (Controller Area Network) là giao thức tiếp nối hỗ trợ mạnh cho những hệ thống điều khiển thời gian thực (distributer realtime control system) với độ ổn định, bảo mật và chống nhiễu cực kì tốt. Ý tưởng của mạng CAN được nhóm kỹ sư tại GmbH Robert Bosch của Đức, nghiên cứu từ đầu thập niên 1980. Họ đã nghiên cứu một công nghệ bus mới dùng trong xe ô tô mà có thể cho phép đưa thêm nhiều chức năng vào nữa mà số lượng dây nối không quá lớn. Ngày nay, hầu như mọi nhà sản xuất chip lớn như: Intel, NEC, Siemens, Motorola, Maxim IC, Fairchild, Microchip, Philips, Texas Instrument, Mitsubishi, Hitachi, Stmicro đều có sản xuất ra chip CAN, hoặc có tích hợp CAN vào thành periperal của vi điều khiển.
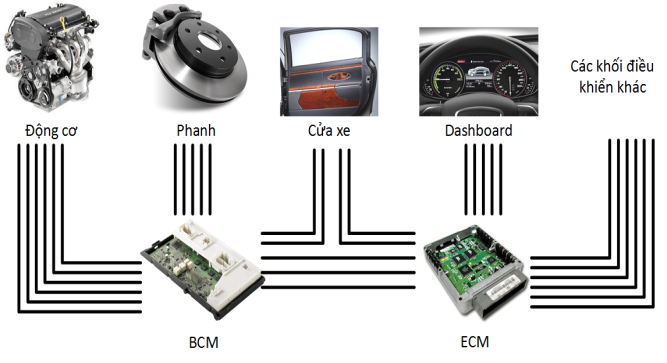
Kết nối các thiết bị không có CAN
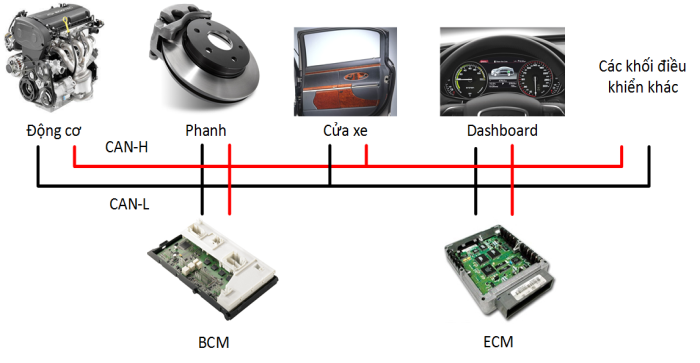
Kết nối các thiết bị với CAN
CAN có những cột mốc quan trọng từ khi được phát triển tới nay
- 1983: Bắt đầu dự án phát triển mạng CAN trên xe hơi nội bộ hãng Bosch
- 1986: Chính thức giới thiệu giao thức CAN
- 1987: Những con chip đầu tiên được sản xuất tại Intel và Philips
- 1991: Bosh ra thông số chuẩn hóa của CAN
- 1992: Thành lập các nhóm các nhà sử dụng và sản xuất CAN quốc tế. Xuất hiện chiếc Meccedes-Benz đầu tiên được trang bị CAN
- 1993: Cho ra bộ tiêu chuẩn ISO 11898
- 1994: Hội nghị quốc tế về CAN lần thứ nhất được tổ chức (iCC)
Những thuốc tính và ưu điểm của CAN
1. Đơn giản, chi phí thấp: Bus CAN chỉ có 2 dây giúp kết nối các module điều khiển với nhau dễ dàng hơn khi so sánh với cách làm truyền thống. Việc này giúp cho việc lắp đặt, sửa chữa, bảo trì hệ thống khi có sự cố một cách dễ dàng.
2. Tạo ra một giao thức chung để nhiều nhà cung cấp khác nhau có thể phát triển các module điều khiển tương thích với nhau.
3. Tính ưu tiên của thông điệp (Prioritization of messages): mỗi thông điệp được truyền từ một nút (node) hay trạm (station) trên bus CAN đều có mức ưu tiên. Khi nhiều thông điệp được truyền ra bus cùng một lúc thì thông điệp nào có mức ưu tiên cao nhất sẽ được truyền đi; Các thông điệp có mức ưu tiên thấp hơn sẽ được truyền khi các lệnh ưu tiên được thực hiện. Việc xác định mức ưu tiên của thông điệp dựa trên các quy định trong chuẩn ISO11898.
4. Cấu hình linh hoạt: Cho phép thiết lập cấu hình bao gồm thời gian bit, thời gian đồng bộ, độ dài dữ liệu truyền, dữ liệu nhận...
5. Nhận dữ liệu đa điểm với sự đồng bộ thời gian: một thông điệp có thể được nhận bởi nhiều node khác nhau trong bus cùng lúc. Tất cả các node trên bus đều có thể thấy thông điệp đang truyền trên bus, tùy vào cấu hình ở mỗi node mà node sẽ quyết định có chấp nhận thông điệp này hay không.
6. Nhiều master (Multimaster ): Có thể quản lí từ nhiều nguồn
7. Phát hiện và báo lỗi: Mỗi thông điệp có kèm theo mã CRC (Cyclcic Redundancy Code) để thực hiện kiểm tra lỗi. Nếu lỗi xuất hiện, node nhận sẽ bỏ qua thông điệp lỗi và truyền khung báo lỗi (error frame) lên bus CAN. Mỗi node trong bus có một bộ đếm quản lý lỗi truyền nhận riêng để xác định trạng thái lỗi của chính nó. Nếu lỗi xuất hiện quá nhiều, một node có thể tự động ngắt khỏi bus. Ngoài ra còn một số dạng lỗi khác có thể được phát hiện với chuẩn CAN.
8. Tự động truyền lại các thông điệp bị lỗi khi bus rảnh: Một thông điệp được truyền ra bus nếu bị lỗi thì sẽ không mất đi mà node truyền thông này sẽ giữ nó lại và tự động phát lại thông điệp này khi bus rảnh cho đến khi thành công. Điều này giúp đảm bảo tính toàn vẹn dữ liệu trong bus.
Các lĩnh vực mà hiện nay có ứng dụng CAN
CAN được ứng dụng trong rất nhiều lĩnh vực khác nhau như: Xe ô tô, tàu khách và tàu hàng, hệ thống điện tử hàng hải, điện tử máy bay, hàng không, tự động hóa trong nhà máy, điều khiển máy công nghiệp, tự động hóa tòa nhà, thang máy, thiết bị y tế... với tốc độ có thể lên tới 1Mbit/s.
• Ứng dụng mạng trong doanh nghiệp: Xây dựng mạng phụ để khởi động hệ thống và hỗ trợ tháo lắp thiết bị trên các bo PC lớn dùng để định tuyến
• Ứng dụng trong bệnh viện: điều khiển các thiết bị trong phòng như bảng điện tử, máy nội soi, máy X-quang, camera,máy in...
• Ứng dụng trong tự động hóa nhà máy: điều khiển tự động hóa các thiết bị
• Ứng dụng trong hệ thống thang máy: Các bo điều khiển thông tin với nhau qua bus CAN ở các tầng và bo mạch chính
• Ứng dụng trong hệ thống cửa tự động: Ứng dụng trong cửa Nabco
Còn nữa...
-Tin tức SONHA AUTO-