Thứ tư, 7/8/2019, 14:20 (GMT+7)
Mạng khu vực điều khiển (CAN) là một giao thức truyền thông nối tiếp được tiêu chuẩn hóa bởi ISO và được sử dụng để truyền các thông tin quan trọng. CAN được áp dụng trong một loạt các lĩnh vực như các thiết bị y tế đòi hỏi cao, máy móc công nghiệp, hệ thống tàu thuỷ, tàu ngầm, phương tiện đường sắt, thang máy...CAN cung cấp các tính năng như khả năng chống nhiễu cao, khả năng phát hiện lỗi và ngắt kết nối, tính toàn vẹn dữ liệu nhất quán và giám sát lẫn nhau với các thiết bị được kết nối. Trong ngành cửa tự động trên thế giới, công nghệ mạng này chỉ được áp dụng cho bộ điều khiển NET-DS của NABCO.
Phần 2: Cấu trúc mạng CAN
Cấu trúc một mạng CAN gồm các thành phần
• Dây cáp gồm hai dây riêng biệt được gọi là CAN_H (CAN Hight) và CAN_L ( CAN Low).
• Điện trở đầu cuối của đường dây 120Ω
• Node (Station): là thành phần kết nối đến bus CAN thông qua 2 dây CAN_H và CAN_L. Các nút này là các bo mạch hoặc module điều khiển
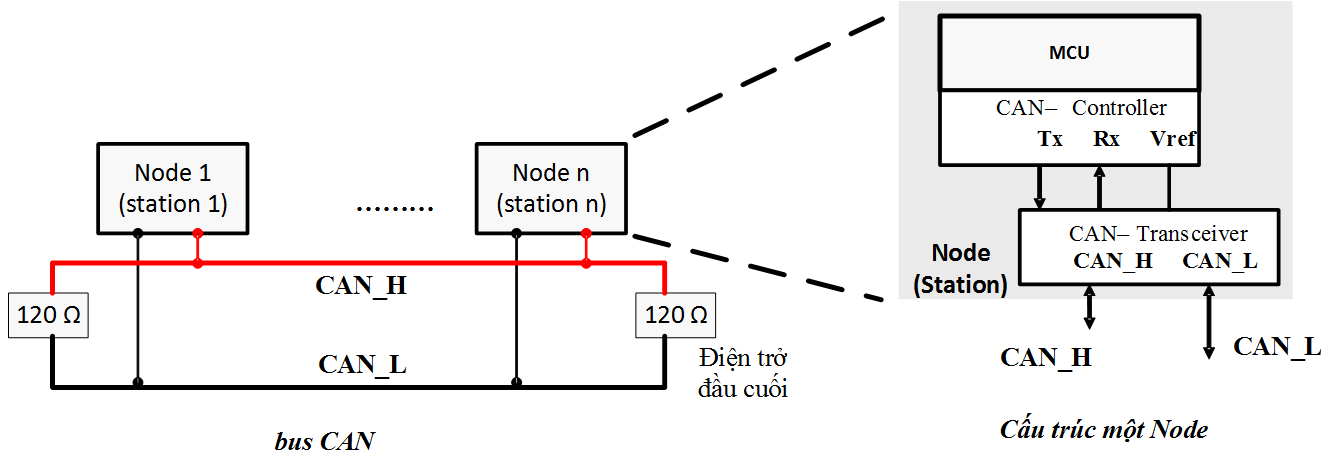
Cấu trúc mạng CAN
Cấu trúc của mạng CAN của cửa Nabco Net DS
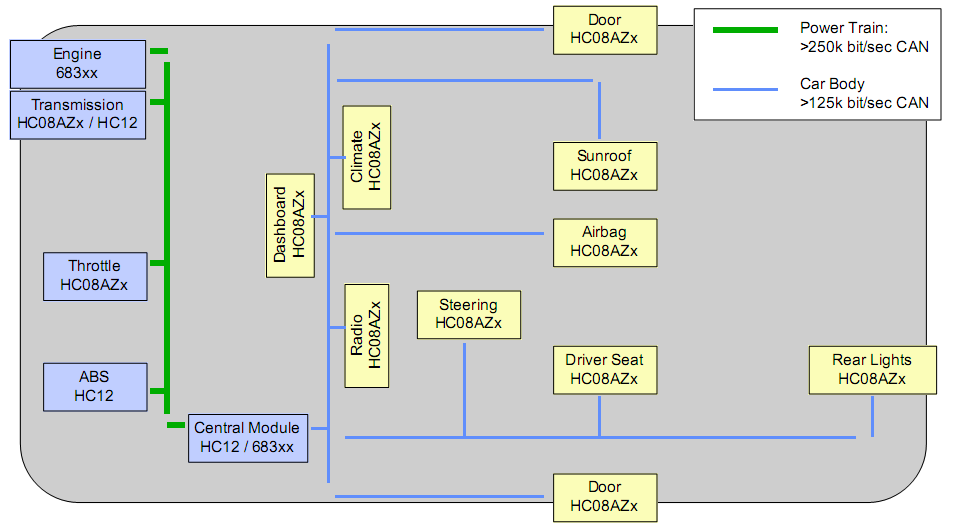
Minh họa một mạng CAN trong xe hơi sử dụng các chip Motorola - nguồn: www.mi.fu-berlin.de
Cấu trúc một node (station) trong mạng CAN
• Mỗi nút CAN yêu cầu có một micro-controller- MCU kết nối với một bộ điều khiển CAN-controller. Bộ điêu khiển CAN sẽ được kết nối với bộ CAN – Transceiver thông qua một đường ra dữ liệu nối tiếp Tx và một đường vào dữ liệu nối tiếp Rx. Đường Vref là điện áp ra tham khảo cung cấp một mức điện áp định danh = 0.5 x Vcc
• Micro-controller - MCU thực thi các tính năng và điều khiển chính của một Node. Thực hiện cấu hình hoạt động cho CAN controller, phân phối dữ liệu nhận từ CAN controller, lấy dữ liệu nhận từ Can controller để sử dụng cho hoạt động của Node.
• CAN controller thực thi các xử lí về truyền nhận dữ liệu, báo lỗi tính toán thời gian bit... theo chuẩn CAN quy định; phát dữ liệu cần truyền dạng số (logic 0/1) ra chân Tx; nhận dữ liệu dạng số qua chân Rx. CAN controller có thể là một chip độc lập hoặc một ngoại vi được tích hợp bên trong vi điều khiển.
• CAN transceiver hoạt động như bộ chuyển đổi từ tín hiệu số (logic 0/1) trên Tx thành tín hiệu tương tự trên bus CAN và ngược lại.
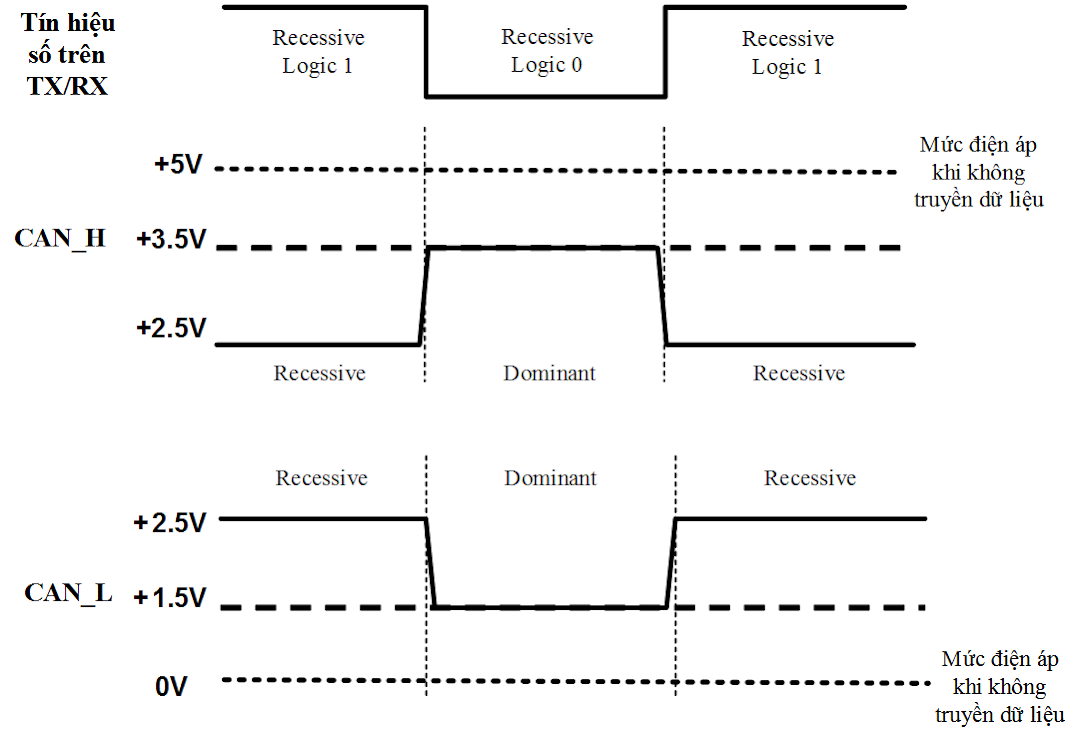
Tín hiệu trên bus CAN
CAN transceiver chuyển đổi qua lại giữa tín hiệu số và tương tự. Trong giao thức CAN qui định như sau:
• Mức dominant/mức trội/mức ưu thế là mức logic 0
• Mức recessive/mức lặn/mức ẩn là mức logic 1
CAN có sự qui định này vì bus CAN hoạt động theo cơ chế AND-wire, khi một logic 0 và một logic 1 cùng được truyền từ CAN controller qua CAN transceiver đến bus CAN thì trên bus CAN sẽ thể hiện mức điện áp biểu diễn cho bit 0 (bit trội).
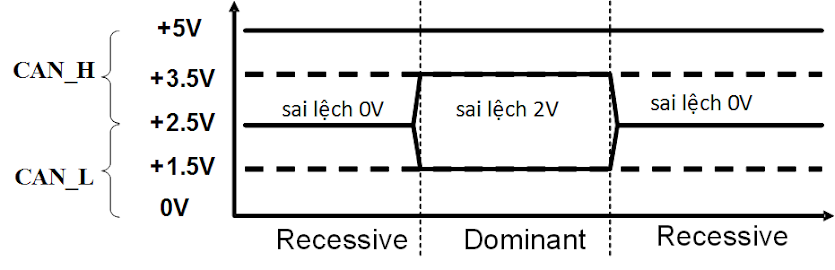
Mức áp trên bus CAN trong tầm từ -2V trên CAN_L đến +7V trên CAN_H nhưng được sử dụng phổ biến là 0V trên CAN_L và +5V trên CAN_H khi dùng ở tốc độ cao 1Mbit/s. Đường CAN_H có mức áp +5V khi ở trạng thái nghỉ và sẽ sụt áp còn +3.5V khi đang hoạt động. Lúc này, mức +3.5V được qui định là mức ‘dominant’ và +2.5V được qui định là mức ‘recessive’. Đường CAN_L có mức điện áp 0V khi ở trạng thái nghỉ và sẽ tăng lên +1.5V khi hoạt động. Lúc này, mức +1.5V được qui định là mức ‘dominant’ và +2.5V được qui định là mức ‘recessive’.
Trạng thái bus dựa vào sự sai lệch điện áp giữa CAN_L và CAN_H. Cụ thể, nếu sai lệch điện áp thấp hơn điện áp ngưỡng tối thiểu thì đó là mức recessive (mức 1) thường dưới +0.5V. Nếu sai lệch điện áp cao hơn ngưỡng tối thiểu thì đó là mức dominant ( mức 0), thường trên +0.9V. Nếu sai lệch điện áp rơi vào khoảng từ 0.5V đến 0.9V thì không thể phân biệt được mức logic và gây sai dữ liệu.
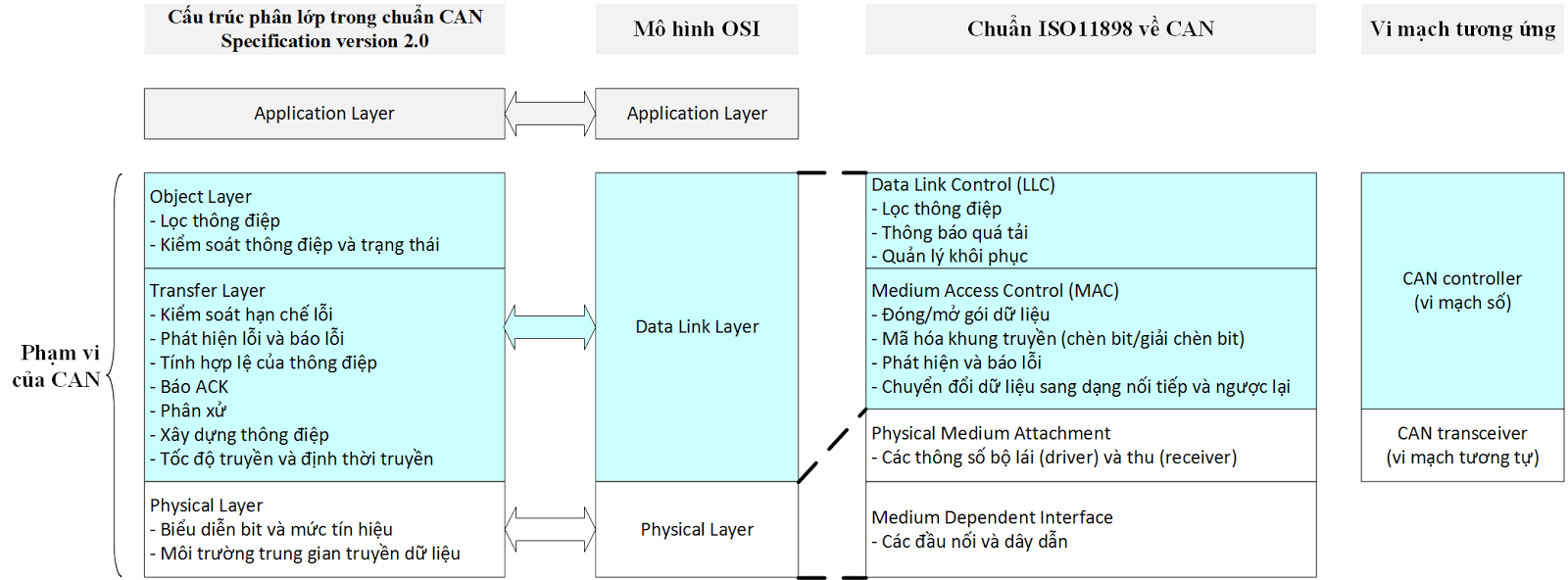
Chuẩn CAN Specification 2.0 đã được chuẩn hóa trong ISO11898, chuẩn CAN qui định chi tiết các chức năng và hoạt động của mạng CAN ở hai lớp Data Link và Physical. Đối với lớp ứng dụng (Application) không được qui định trong chuẩn nhưng hiện nay có hai giao thức khá phổ biến là CANopen và DeviceNet. CÁc chức năng của hai lớp này đều do phần cứng (vi mạch, chip) chuyên dụng tự thực hiện theo cấu hình được nạp vào. Các chức năng lớp Data Link do chip chuyên dụng CAN controller (chíp số) hoặc ngoại vi CAN được tích hợp trong vi điều khiển MCU thực hiện. Chức năng lớp vật lí (Physical) do chip Can transceiver( chip tương tự) thự hiện.
Còn nữa...
Phần 1: Quá trình phát triển và ứng dụng của CAN (Controller Area Network)
-Tin Tức SONHA AUTO-